Momentum and Adaptive SGD
参考课件:
Accelerated SGD:
Adaptive SGD:
1 为什么需要动量(Momentum)¶
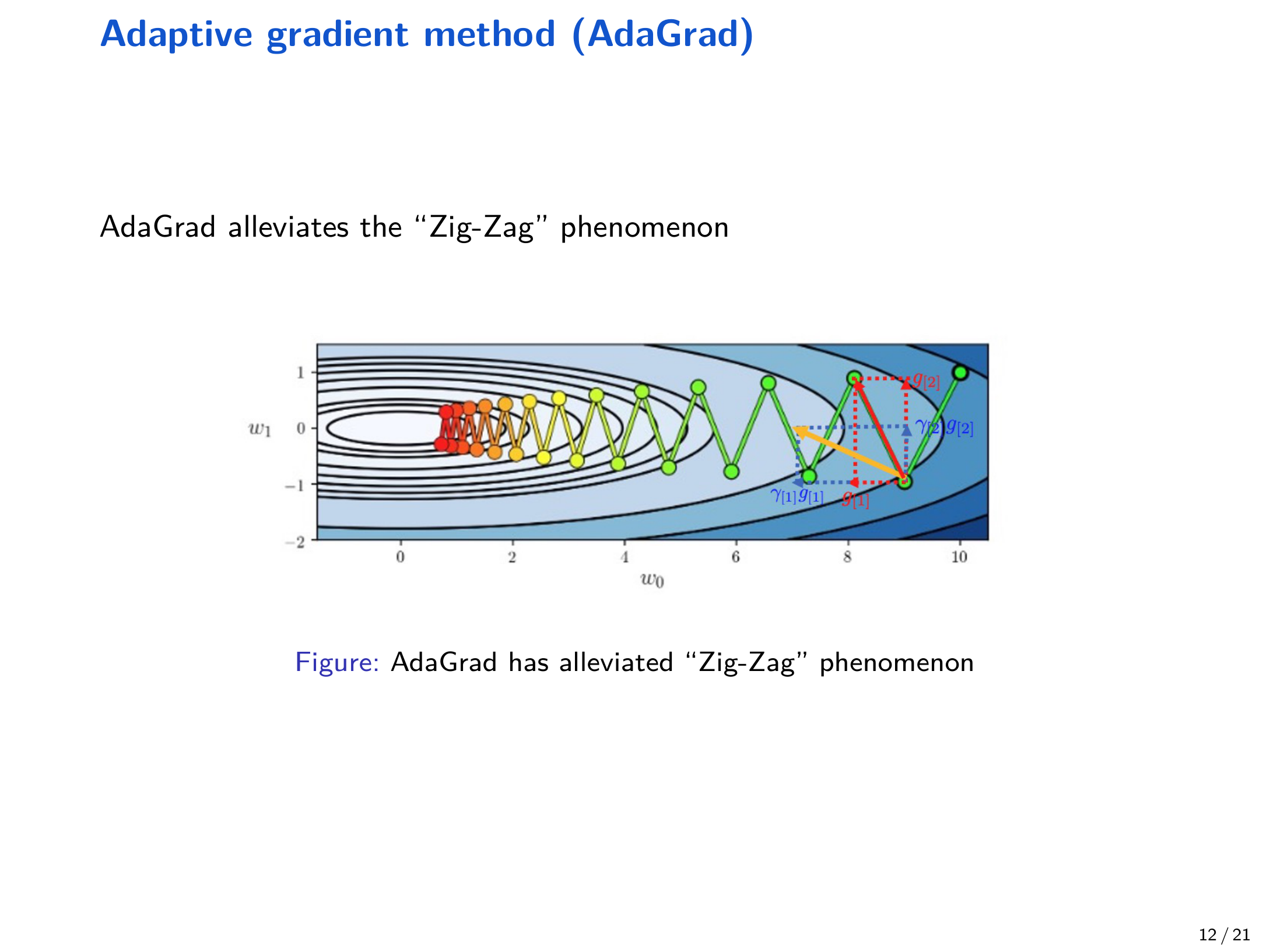
在深度学习训练中,优化问题常常呈现出 “狭长谷底” 等 病态(ill-conditioned 几何结构:沿某些方向曲率很大、另一些方向曲率很小。此时标准梯度下降会出现明显的 “Zig-Zag” 现象,导致收敛非常慢。
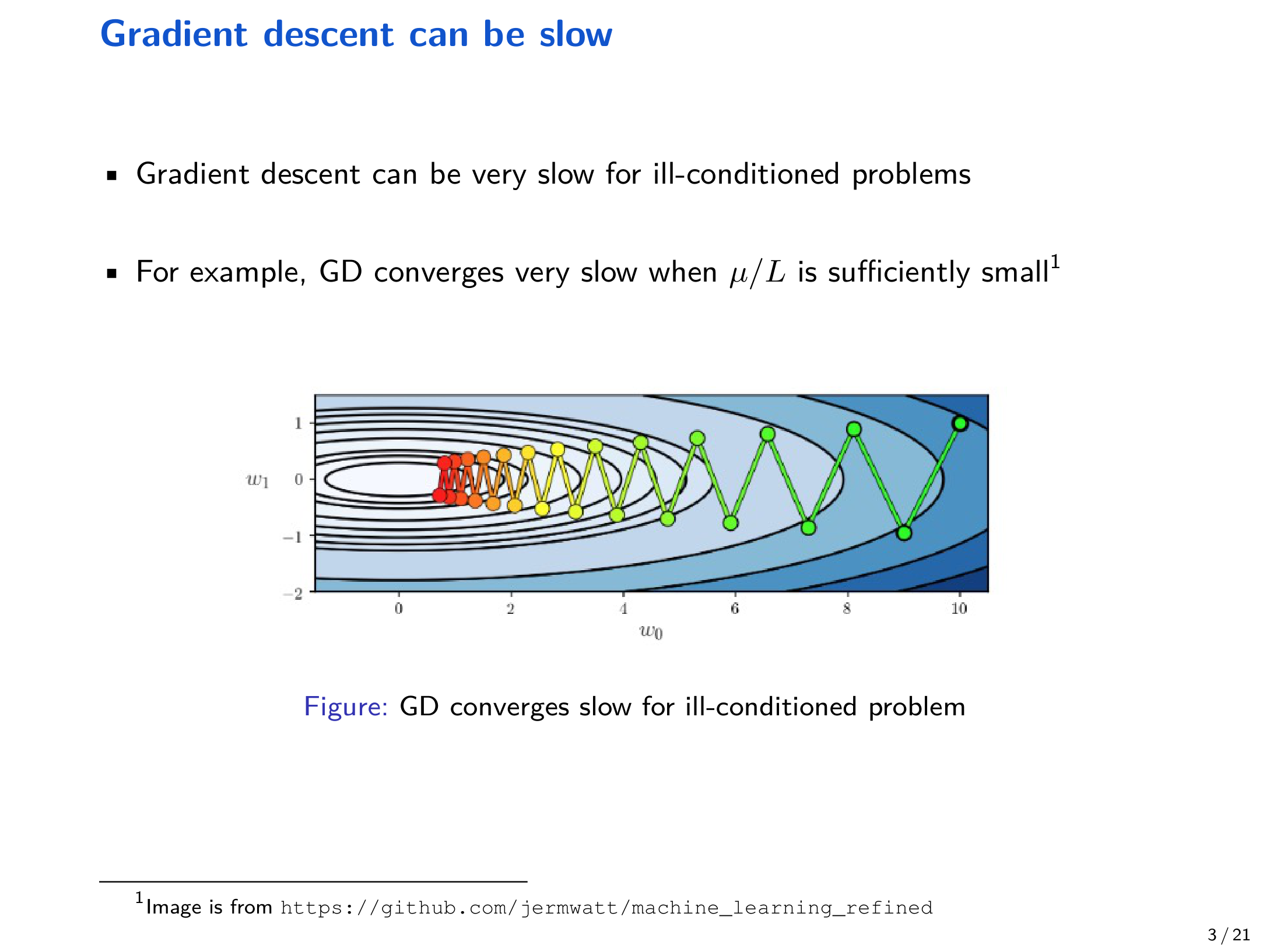
一种朴素想法是:在更新中引入 “惯性”,把历史更新方向叠加进来,让轨迹少走弯路。
2 从加速 GD 到加速 SGD¶
2.1 Polyak 动量(Heavy-ball)¶
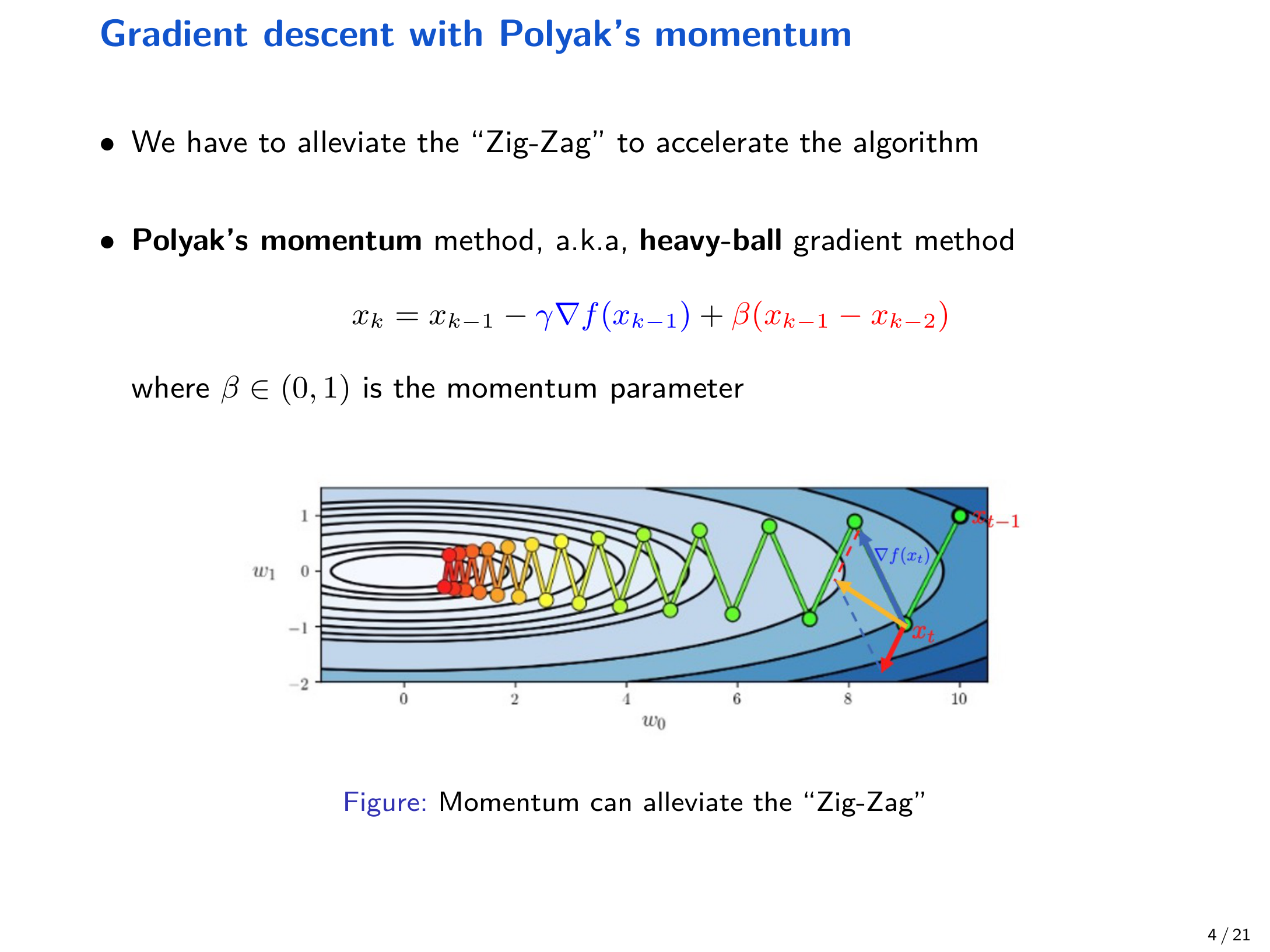
Polyak 动量(又称 heavy-ball)在确定性梯度下降中使用:
其中 \(\beta\) 控制 “惯性” 强度,\(\gamma\) 是学习率。直观上,\(\beta (x_{k-1}-x_{k-2})\) 会沿着上一步的位移方向继续推进,从而缓解 Zig-Zag。
2.2 Nesterov 动量(NAG)¶
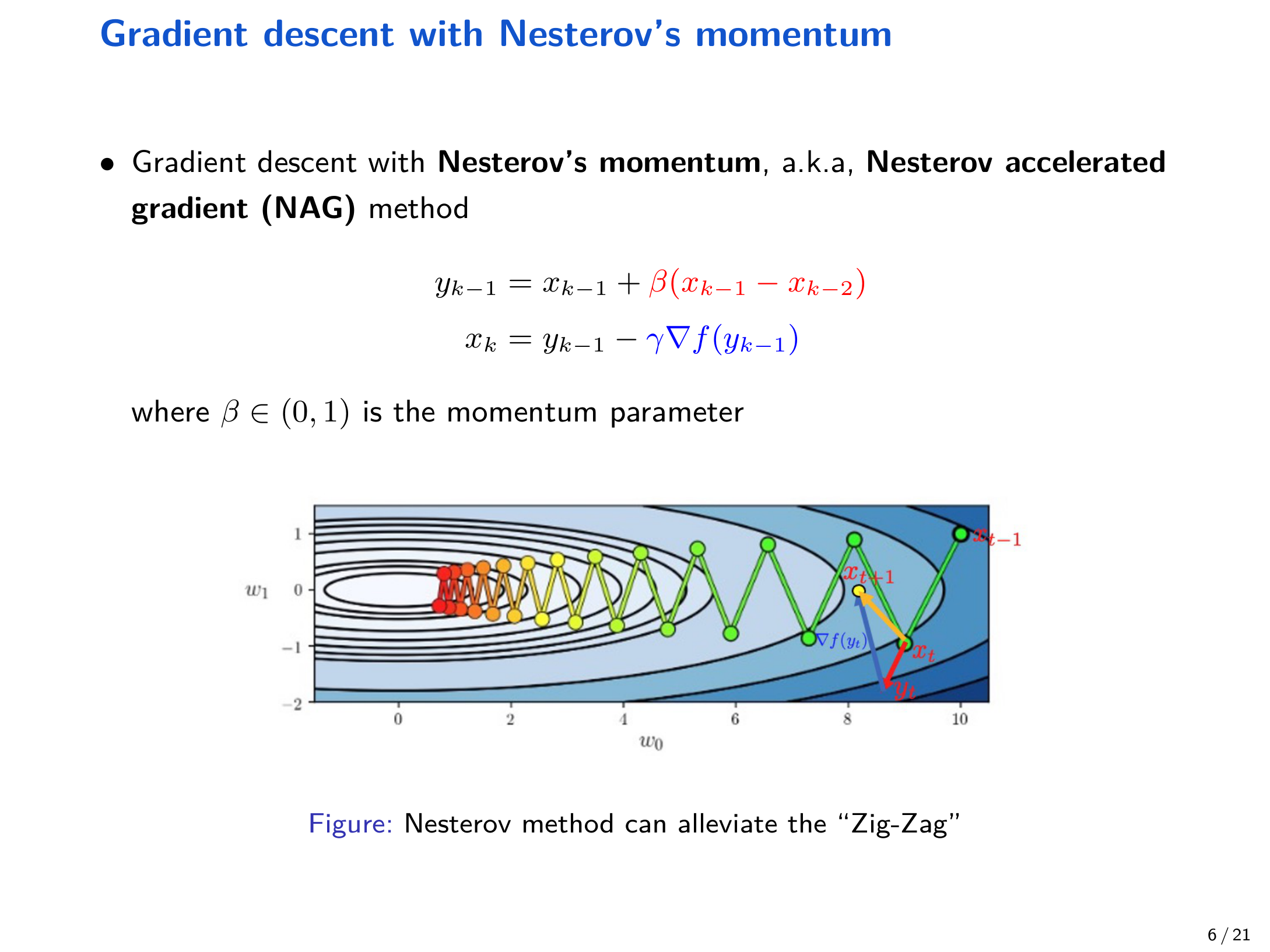
Nesterov 加速梯度(NAG)常写成 “先外推、再求梯度” 的形式:
相比 heavy-ball,NAG 用外推点 \(y_{k-1}\) 来计算梯度,确定性凸优化下可达到经典的 \(O(1/k^2)\) 加速率。
3 Momentum SGD:重球动量在随机梯度上的实现¶
随机优化问题为:
标准 SGD 更新为:
Momentum SGD(Polyak 动量的随机版本)则为:
它也常被写成 “动量缓冲区(momentum buffer)” 的形式:
该写法与常见深度学习框架(例如 PyTorch 的 SGD with momentum)实现一致。
3.1 现象:动量看似加速,但也可能恶化最终效果¶
讲义在简单线性回归例子中展示:
- 在相同学习率下,加入动量可能更快下降,但最终误差反而更大
- 调整学习率后,动量方法的轨迹常与 “更大学习率的 SGD” 现象相似
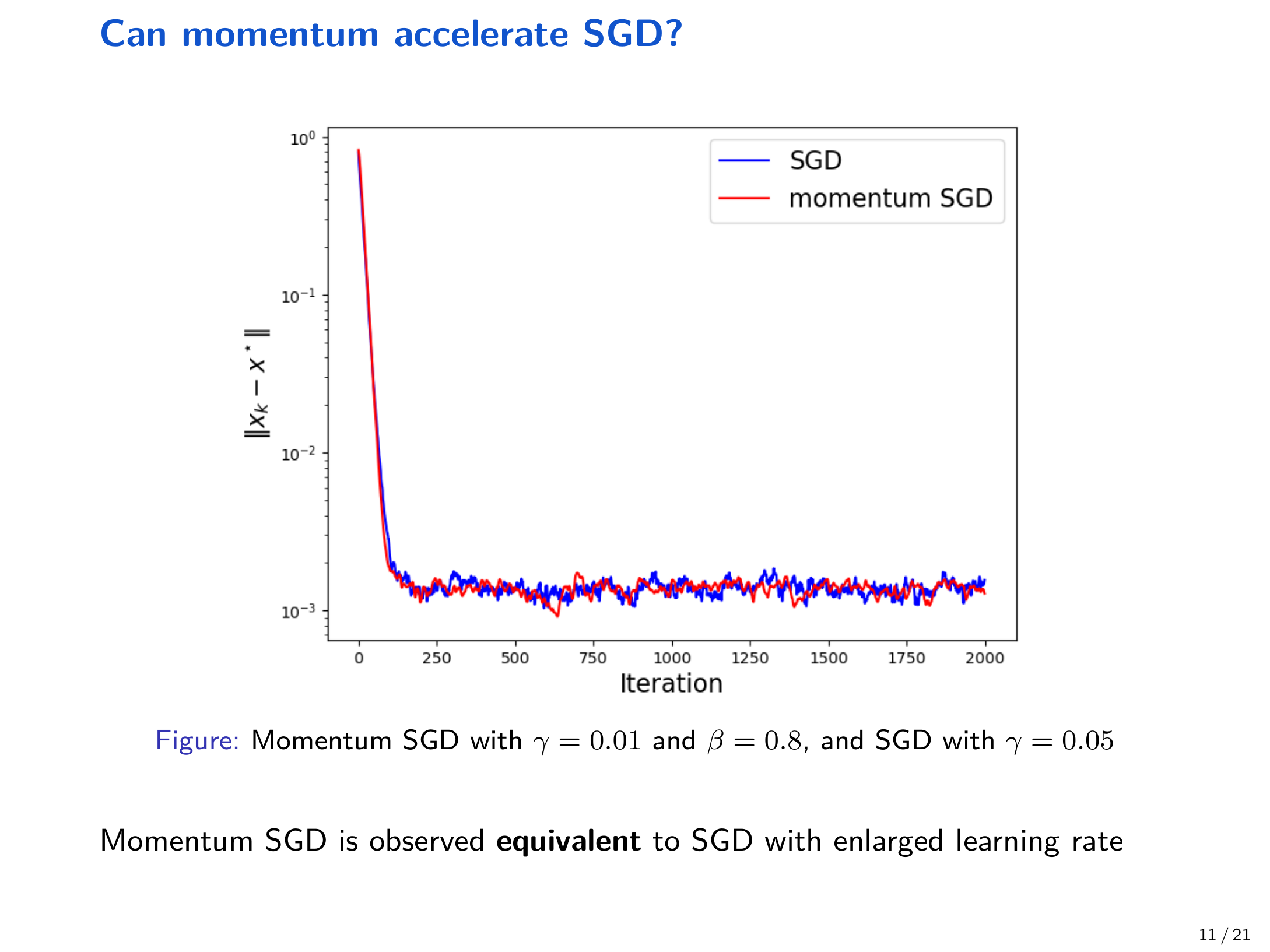
4 一个重要结论:在小学习率下,Momentum SGD 等价于放大学习率的 SGD¶
讲义给出一个非正式定理(Yuan et al., 2016),解释了上面的数值观察。
定理(Yuan et al., 2016,非正式)
假设 \(f\) 是 \(L\)-smooth 且强凸。若动量法的学习率 \(\gamma_m\) 足够小、动量系数 \(\beta\) 与 \(1\) 有固定间隔(bounded away from \(1\)),并令
则 Momentum SGD 与标准 SGD(学习率为 \(\gamma_s\))在收敛行为上等价。
该结论带来两个直接含义:
- 动量看起来像是 “把学习率放大了 \(1/(1-\beta)\)”
- 当学习率已经足够小时,动量并不会带来额外理论收益(这也是一个 “负面结果”)
5 Nesterov 动量的随机版本:Accelerated SGD 的收敛性¶
Polyak 动量在理论上不带来真正加速后,一个自然问题是:Nesterov 动量在随机梯度下能否加速?
5.1 算法:Nesterov Momentum SGD(讲义/讲义笔记记号)¶
笔记(notes_ch8_1)使用如下迭代:
其中 \(\theta_k\) 是随迭代变化的动量参数。
5.2 两个基本假设(随机梯度 Oracle)¶
假设 5.1(无偏 + 有界方差)
给定过滤族(filtration)\(\mathcal{F}_k\),假设
其中 \(\mathcal{F}_k\) 表示第 \(k\) 步之前的所有历史信息(包含 \(x_0,y_0,v_0,\xi_0,\dots,\xi_{k-1}\) 以及由它们生成的迭代变量),而当前采样 \(\xi_k\) 不属于 \(\mathcal{F}_k\)。
5.3 收敛结果:凸光滑情形的 “部分加速”¶
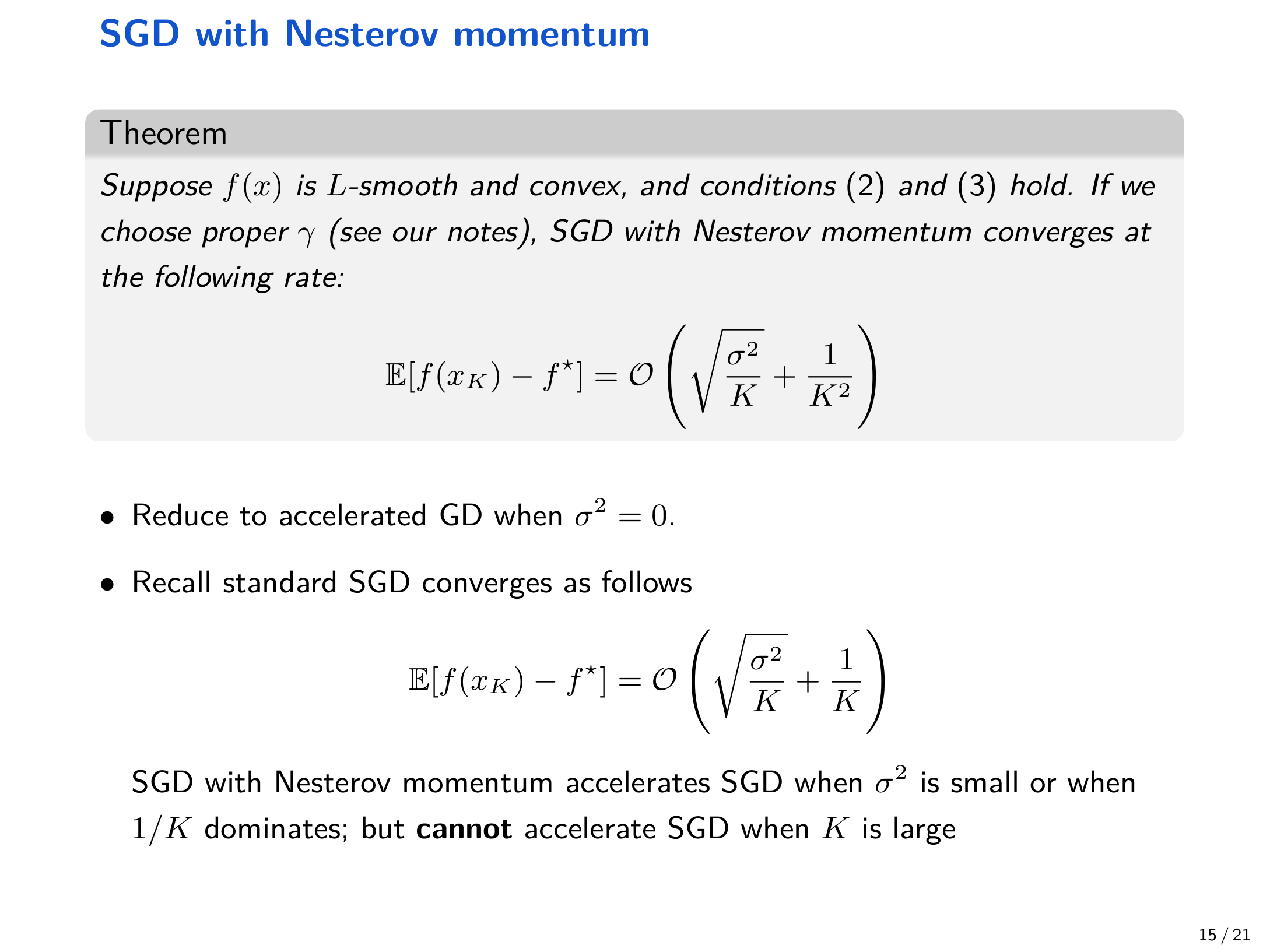
讲义给出的结论可以概括为:当 \(f\) 是凸且 \(L\)-smooth 时,Nesterov 动量的随机版本满足
当 \(\sigma^2 = 0\) 时退化为确定性加速 GD 的 \(O(1/K^2)\);而标准 SGD 在同样假设下通常为
因此,动量只能加速确定性项(\(1/K \to 1/K^2\)),但无法改善随机噪声主导项 \(\sqrt{\sigma^2/K}\)。当 \(K\) 足够大时,\(\sqrt{\sigma^2/K}\) 往往支配整体误差,从而 “看不到” 加速。
5.4 更精确的上界(notes_ch8_1)¶
定理 5.2(He & Yuan,notes_ch8_1: Theorem 3.2)
设 \(f\) 是凸且 \(L\)-smooth,并且假设 5.1 成立。若取 \(\theta_k = 2/(k+1)\) 且 \(0<\gamma \le 1/L\),则
其中 \(\Delta_0 := \|x_0-x^\star\|_2^2\)。
进一步若取
则有简化上界
6 下界:为什么无法加速噪声主导项¶
讲义给出一个典型的随机优化下界:对任何一阶算法(每一步只能使用过去随机梯度信息),总存在某个凸且 \(L\)-smooth 的目标函数,使得该算法输出满足
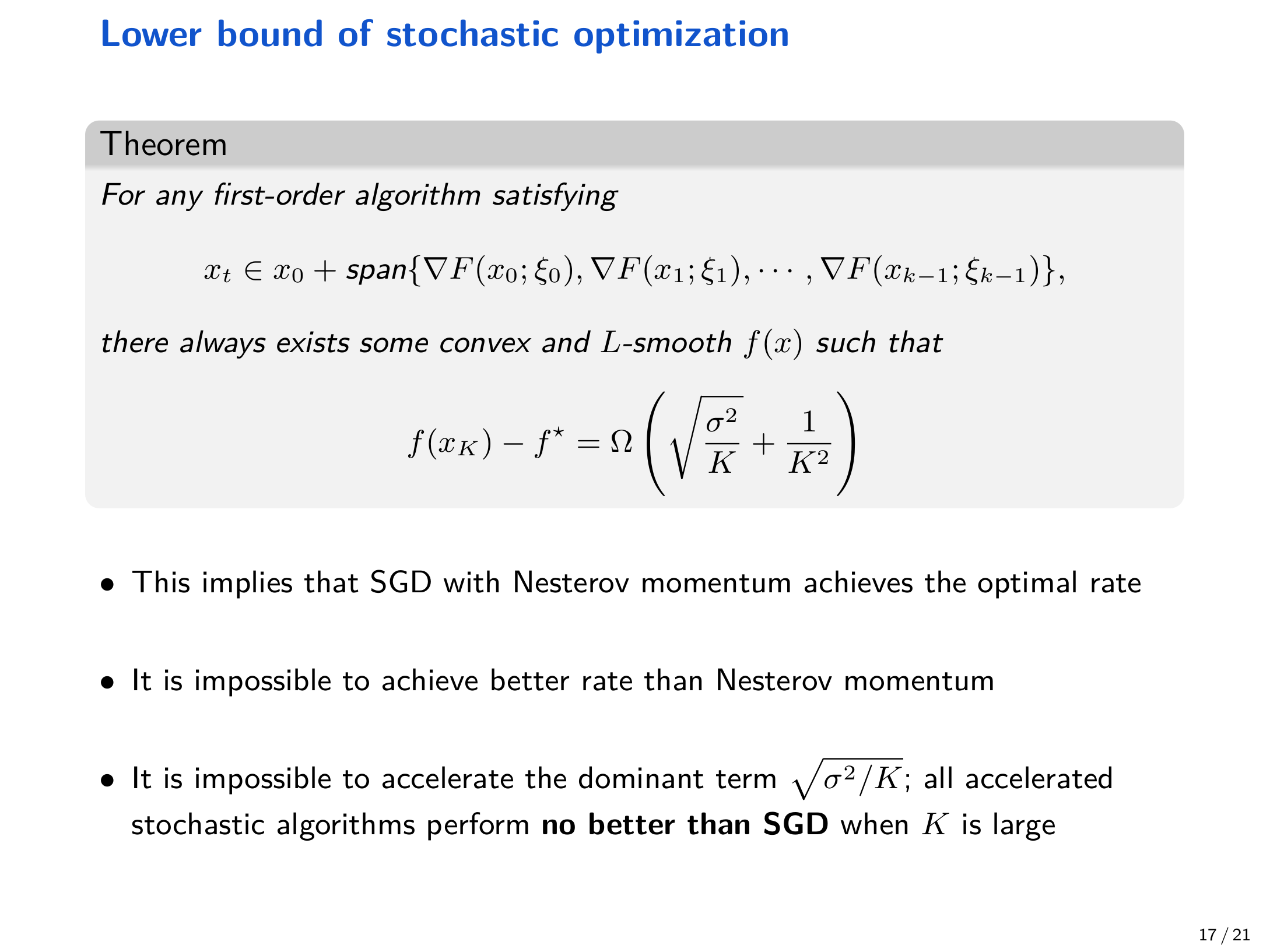
该下界意味着两点:
- \(1/K^2\) 这类确定性项可以被加速并达到最优
- 但主导项 \(\sqrt{\sigma^2/K}\) 在仅使用凸性 + 光滑性假设时无法改进,因此当 \(K\) 大、噪声主导时 “加速” 在阶数上不可能发生
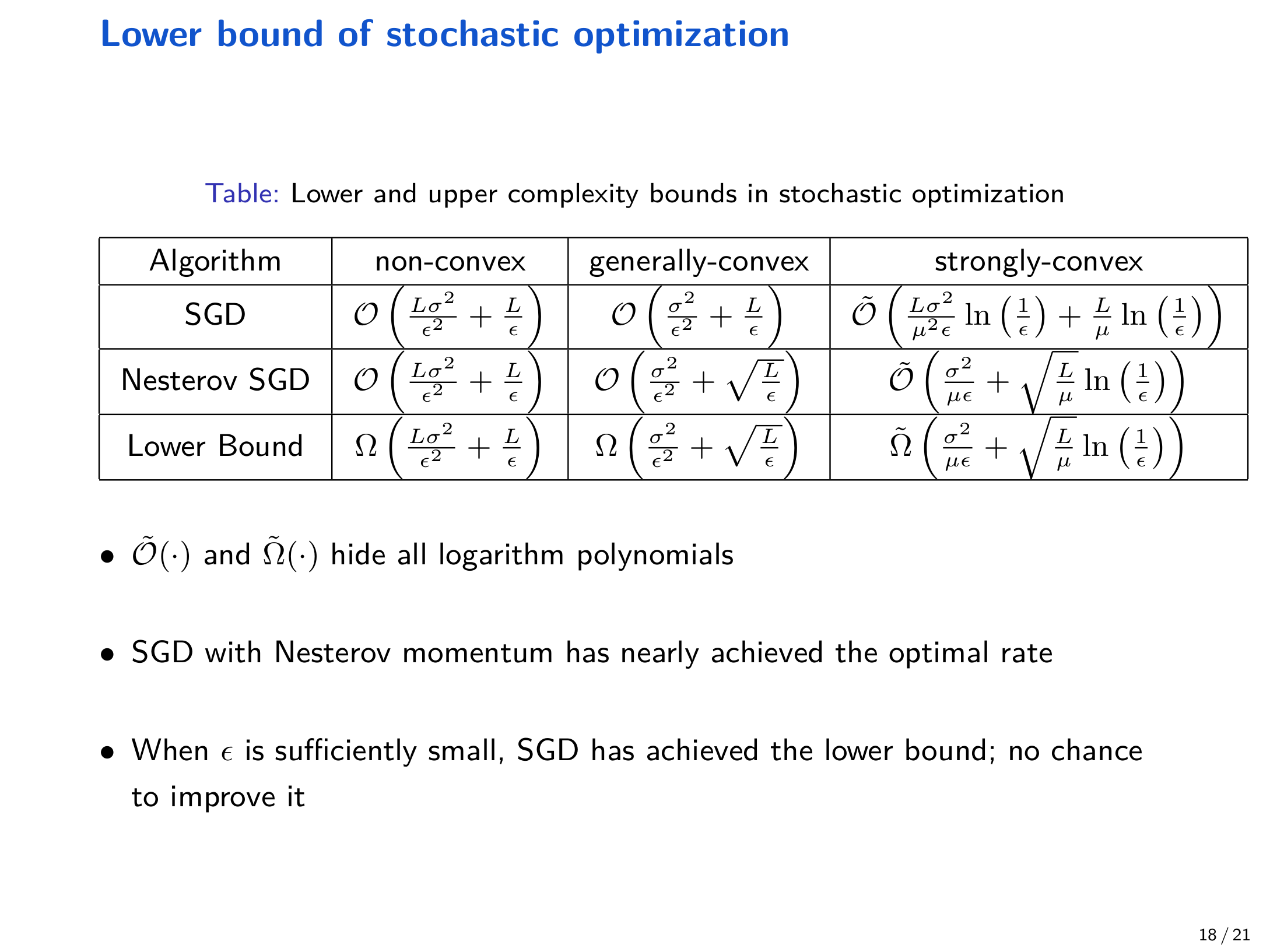
讲义同时总结了不同设置下的复杂度上界/下界对照表。
notes_ch8_1 也给出一般凸情形的迭代复杂度下界(Proposition 4.2):对任意 \(\Delta_0>0\),存在常数 \(c=\Theta(1)\)、凸 \(L\)-smooth 的 \(f\) 与满足假设 5.1 的随机梯度 oracle,使得任意算法要达到 \(\mathbb{E}[f(\hat x)]-f^\star\le \varepsilon\)(\(0<\varepsilon\le cL\Delta_0\))至少需要
次迭代。
7 实践:为什么动量仍然被广泛使用¶
尽管上述理论表明 “在阶数意义下很难加速噪声主导项”,动量仍在实际深度学习训练中几乎无处不在。讲义指出理论与实践之间仍存在缺口,一个可能的原因是深度模型/数据具有额外结构,尚未被这些经典假设所捕捉。
8 Adaptive SGD:从预条件(Preconditioning)到自适应学习率¶
自适应方法的核心观点是:病态性往往体现在不同坐标方向的尺度差异上,如果能构造合适的预条件矩阵 \(P_k\),就能对不同方向自动缩放更新幅度。
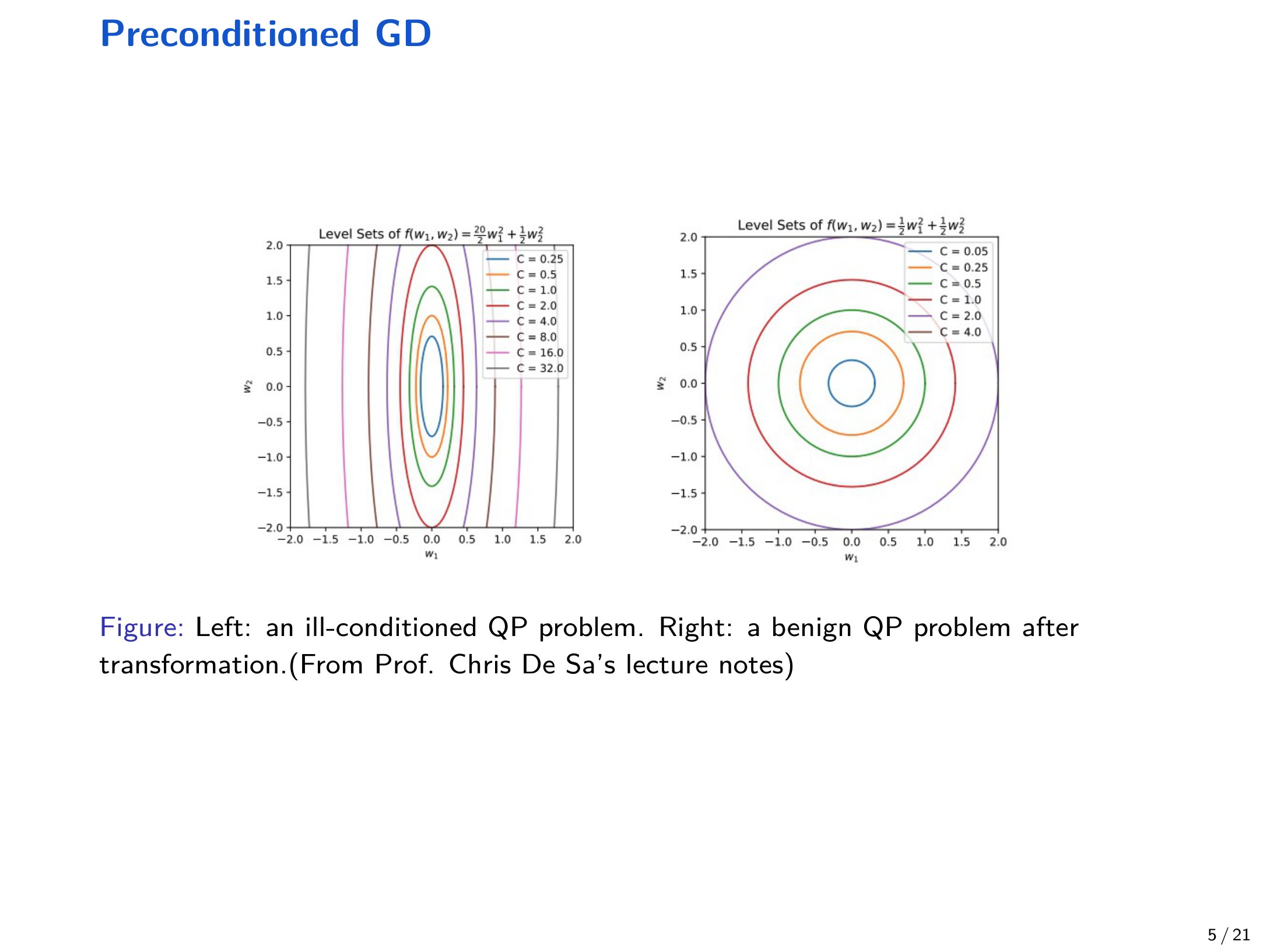
8.1 预条件梯度下降(Preconditioned GD)¶
对于病态二次型问题,直接 GD 往往很慢:
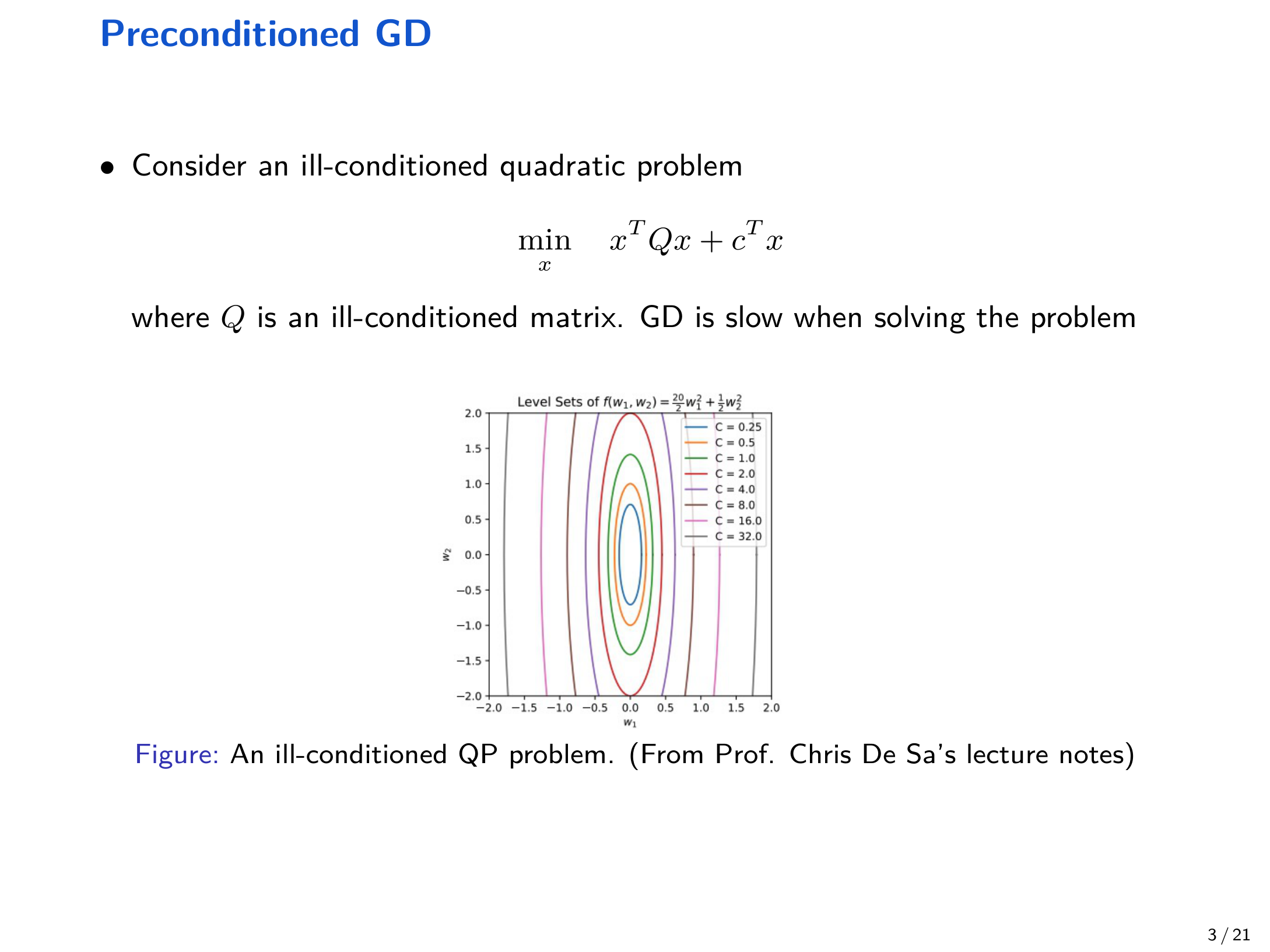
通过变量替换 \(x = P^{1/2} w\) 可改善几何结构;当 \(P = Q^{-1}\) 时可把病态问题变为良态问题,从而显著加速。
一般地,预条件 GD 形如:
若取 \(P_k = [\nabla^2 f(x_k)]^{-1}\),则退化为牛顿法。对应到随机优化,即预条件 SGD:
9 AdaGrad¶
AdaGrad 是典型的坐标自适应方法,使用历史梯度平方的累加来缩放每个坐标方向的步长。令
则 AdaGrad 更新为(\(\odot\) 表示逐元素运算):
它可以视为预条件 SGD,取
因此,对 “经常出现大梯度的方向” 自动减小学习率,对 “梯度较小的方向” 相对增大学习率,从而缓解 Zig-Zag。
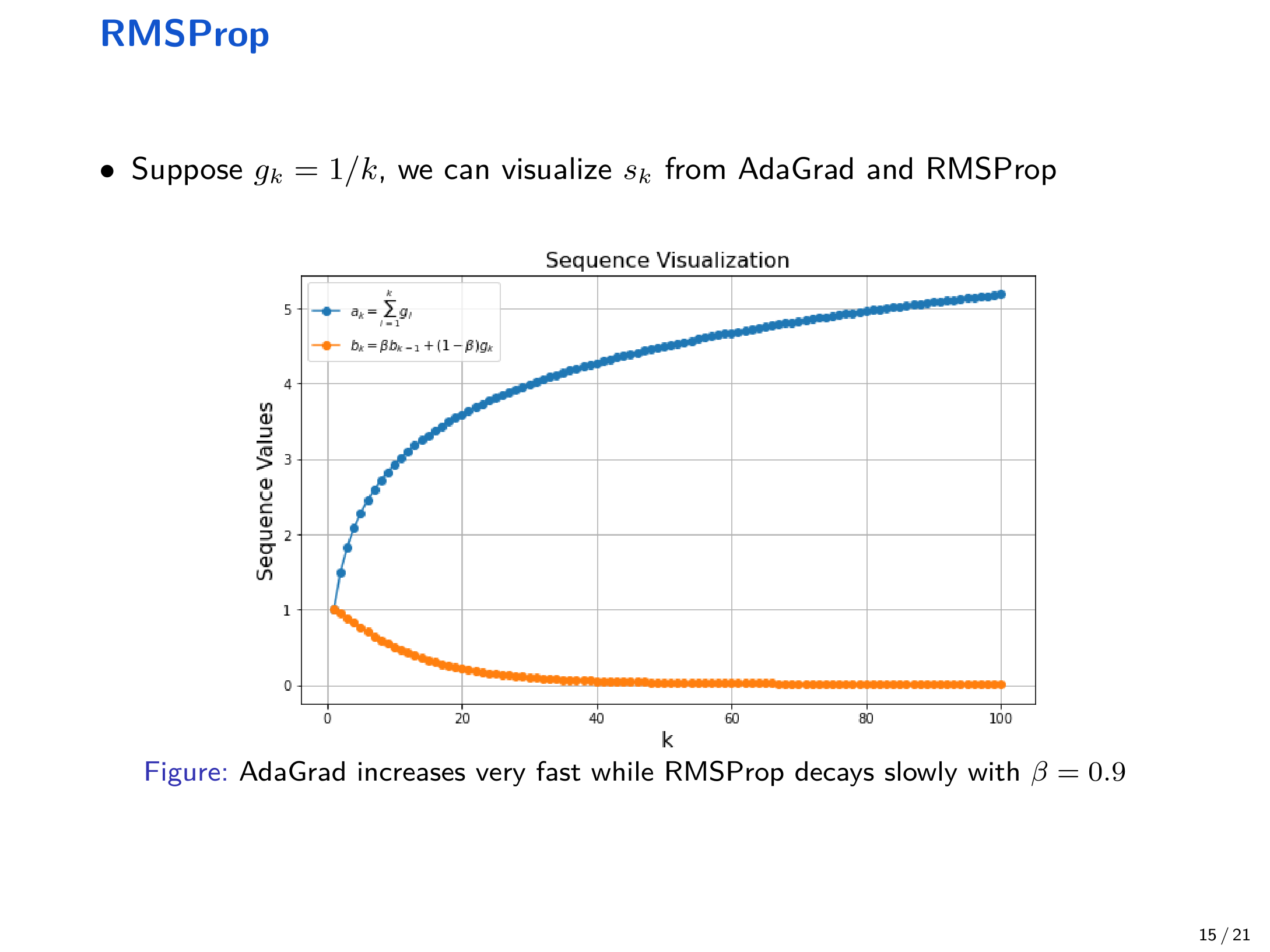
10 RMSProp¶
AdaGrad 的一个问题是 \(s_k\) 单调累积,导致有效学习率不断变小,后期可能过慢。RMSProp 改为指数滑动平均:
并使用同样的预条件更新:
11 Adam:动量 + 自适应学习率¶
Adam 同时引入一阶动量与二阶累积(逐元素):
其中常用超参数为 \(\beta_1=0.9,\beta_2=0.999\),并用 \(\varepsilon\) 做数值稳定。
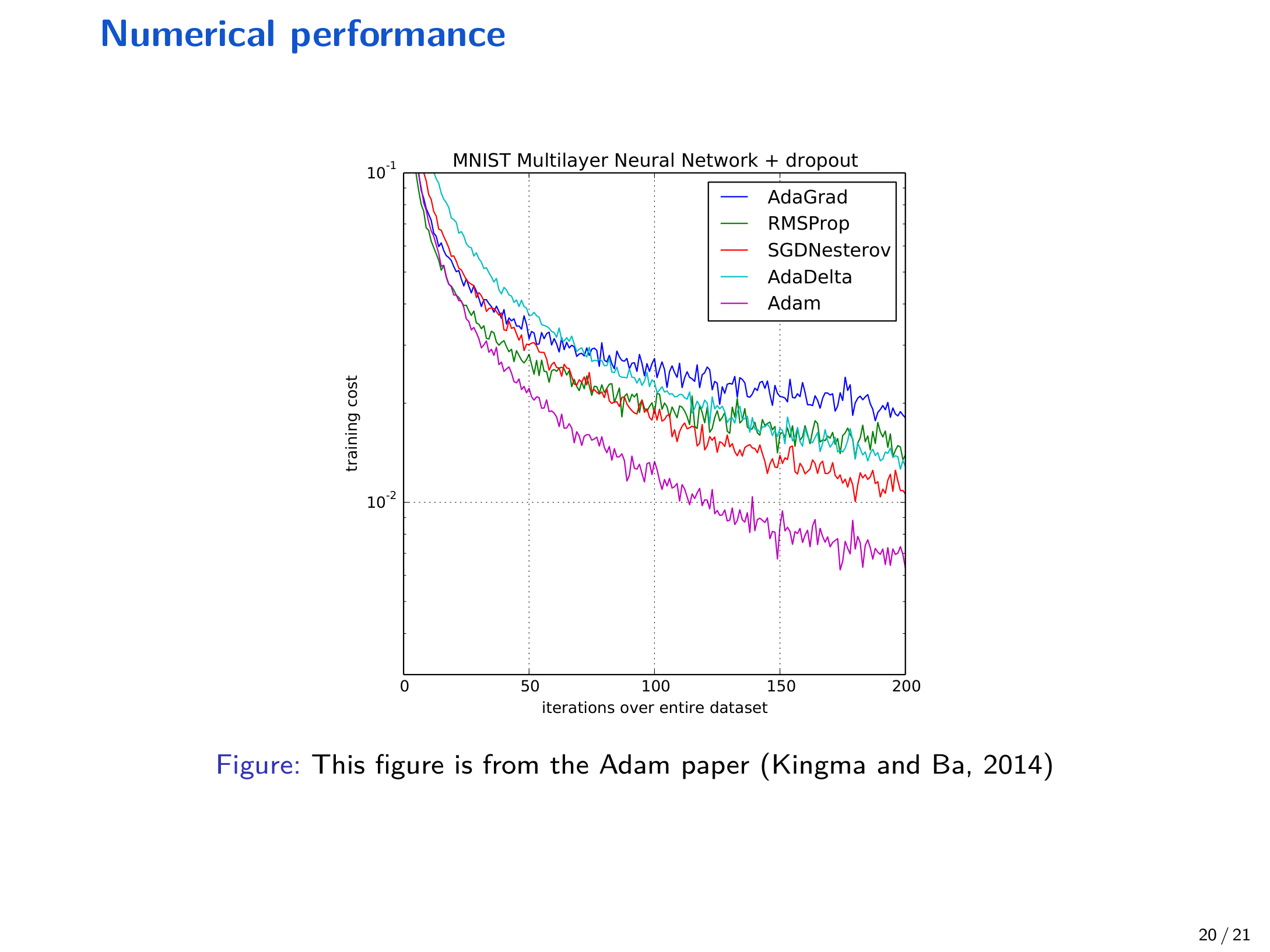
12 数值表现与参考文献¶
讲义展示了在 MNIST 多层网络 + dropout 上,多种自适应算法/动量算法的训练曲线对比(图来自 Adam 论文)。
参考文献(与讲义一致):
- Kingma, D. P., & Ba, J. (2014). Adam: A method for stochastic optimization.
- Yuan, K., Ying, B., & Sayed, A. H. (2016). On the influence of momentum acceleration on online learning.
- Carmon, Y., Duchi, J. C., Hinder, O., & Sidford, A. (2020). Lower bounds for finding stationary points.